
知能四足歩行ロボット


導入
アルゴリズムのアップグレード:より機敏で柔軟な動き
障害物を乗り越える能力と高難易度動作能力を向上させる
1.溝を飛び越えたり、高くジャンプしたり、前宙返りなどの高難易度技を繰り出すことができる。
2. 15cmの段差を登る。これは同サイズの四足歩行ロボットが到達できるほぼ最大高さである。
3. バックフリップ、ボディツイスト、ツイストジャンプ、手を振る動作、ムーンウォーク、ロールオーバー、起き上がりなどをサポートします。
スケーラブルな進化
無限の拡張性を実現するモジュール設計
1.45kgの歩行ペイロードにより拡張スペースが大幅に拡大
2. 高度な知覚機能開発インターフェース(SDKおよびAPI)を提供する
3. オープンなモジュール構造とインターフェースを備え、RTKモジュール、5G、AIホスト、エッジプロセッサ、各種センサーの設置をサポートします。
4. LiDARと深度カメラを搭載し、自律航行、障害物自動停止・回避、視覚測位、環境再構築などの高度な認識能力を深く開発することが可能です。
関節トルクが50%増加:動きのための強力なパワー
自社開発の高トルクジョイント駆動モジュールは、超高トルク密度、応答帯域幅、および逆伝達効率を特長としています。
歩行時の最大積載量が1.40%増加
2.動作持続時間がほぼ2倍になり、連続動作時間は90分、移動距離は5kmに達しました。
産業用制御システムの演算能力が3倍に向上
産業グレードのIMUを採用し、安定性と演算能力を全面的に向上させる。
1. 高度に最適化されたカーネルを備えた産業グレードのリアルタイム制御システムを初めて導入
2. 全体的な計算能力が約3倍に増加した
3. 高いリアルタイム通信と最大1kHzの制御周波数を備えています。
完全にアップグレードされたヒューマンマシンインタラクションシステム
1.遅延を低減し、ファーストビューのリアルタイム画像伝送性能を向上
2. 軽言語による対話機能を追加し、ユーザーが四足歩行ロボットの様々な状態をリアルタイムで取得できるようにしました。
3. より安全で多様な知覚支援型動作
4. 前方および後方の障害物停止、認識および追従、前方障害物回避、自律航行などの機能をサポートする
技術仕様
| 1. ハードウェアプラットフォーム | |
| 立位サイズ | 長さ610mm±10mm、 幅370mm±10mm、 高さ445mm±10mm |
| 横たわった時のサイズ | 長さ680mm±10mm、 幅370mm±10mm、 高さ175mm±10mm |
| 総重量(バッテリー含む) | 約12.2kg |
| 無負荷耐久性 | 所要時間:1.5時間~2時間、距離:4km |
| このロボットは、バランス制御にフルフォースコントロールアルゴリズムを採用しています。足裏圧センサーを使用せずに、足部で360°のブラインドフリー3D力覚センシングを実現できるため、靴の摩耗が少なく、メンテナンスコストも低く抑えられます。 | |
| 材料 | 太もも部分:アルミニウム合金製。 シャンク:高強度複合プラスチック;s 素材:衝撃吸収性、滑り止め性、耐摩耗性に優れたゴム。 |
| バッテリー | プラグイン式リチウム電池を搭載。電池容量は4400mAh以上、定格エネルギーは126.7Wh以上。充電時間は40分~1時間。 |
| 被写界深度 | 総自由度(DOF):12;脚あたりの自由度:3。 |
| ジョイントモジュール | 外径76mm以下の統合型ジョイントモジュールを採用。高トルク密度モーター、高精度減速機、アブソリュートエンコーダ、温度センサーで構成されています。 |
| 二次開発を容易にするため、電源出力(5V/12V/24V)と通信インターフェース(イーサネット/WiFi)を内蔵しています。 | |
| 保護モード | ソフト緊急停止、低電圧警報、過熱警報。 |
| 2.モーションコントロール |
| 工業グレードの慣性センサーを採用。加速度計の分解能は最大0.09mg、ジャイロスコープの分解能は最大0.004°/s。 |
| 通信バス制御周波数:1kHz。 |
| 安定した歩行と速い歩様を実現します。 |
| 階段昇降、坂道登り、這い歩きなどの歩行をサポートします。最大登坂傾斜:40°(傾斜面の材質によります)。最大連続階段高さ:15cm。コンクリート道路、砂利道などに対応します。 |
| 連続歩行時の最大積載量:4.5kg。 |
| その場でのステップ移動、前後左右への移動、左右への回転をサポートします。 |
| 前方ジャンプ、ツイストジャンプ、ムーンウォークなど、様々な動作を実演できます。最大前方ジャンプ距離:50cm。 |
| 他の高性能な歩行や動作の開発をサポートします |
| 3. 知能的知覚 |
| 広角カメラ*1:水平視野角130°、1920×1080@30fps、反射防止、歪みなし、人体認識および追跡アルゴリズムの開発をサポート。 |
| 超音波レーダー*2:距離検出および障害物停止アルゴリズムの開発をサポートします。 |
| 前方および後方の障害物回避機能を搭載。 |
| 4.二次的発展 |
| ロボットモデル、モーションSDKおよびAPI、モーション開発デモ、詳細な二次開発マニュアルを提供します。 |
| 知覚開発ソフトウェアのインターフェースを提供し、詳細なユーザーマニュアルと開発者マニュアルが付属しています。また、迅速な二次開発のためのROSシステムが内蔵されています。 |
会社概要
2008年、北京和威永泰科技有限公司が北京に設立されました。特殊安全装置の開発と運用に重点を置き、主に公安法、武装警察、軍隊、税関などの国家安全保障部門にサービスを提供しています。
2010年、江蘇和威警察装備製造有限公司が官南市に設立されました。9000平方メートルの工場とオフィスビルを擁し、中国における一流の特殊安全装備の研究開発拠点の構築を目指しています。
2015年、深圳に軍事警察研究開発センターが設立されました。特殊安全装備の開発に重点を置き、200種類以上の専門的な安全装備を開発してきました。






海外展示会


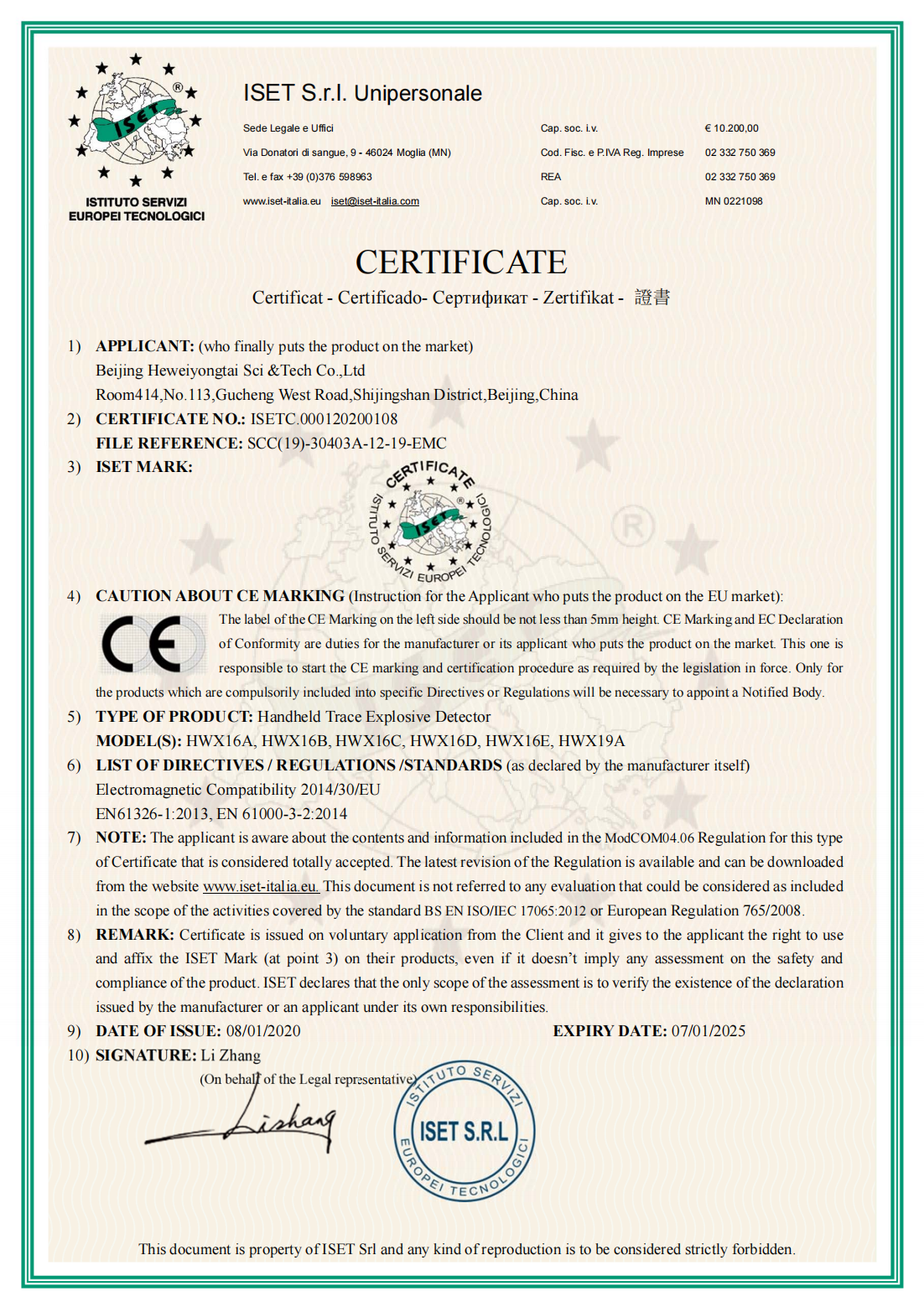
証明書

北京和威永泰科技有限公司は、爆発物処理(EOD)およびセキュリティソリューションの大手サプライヤーです。当社のスタッフは全員、資格を持った技術者および管理職であり、お客様にご満足いただけるサービスを提供いたします。
すべての製品は国家レベルの専門試験報告書と認証証明書を取得していますので、安心してご注文ください。
製品の長寿命化と作業者の安全な作業を保証するため、厳格な品質管理を実施しています。
EOD(爆発物処理)、対テロ装備、情報収集装置などに関する10年以上の業界経験があります。
当社は世界60カ国以上のお客様にプロフェッショナルなサービスを提供してまいりました。
ほとんどの商品に最低注文数量はありません。特注品は迅速にお届けします。




